
Geolocalizzazione e dispositivi mobili
Quando si parla di geolocalizzazione nei dispositivi mobili, la tendenza è di dare molte cose per scontate. La conoscenza approssimata del modo in cui funziona la determinazione della posizione di un dispositivo, delle precisioni raggiungibili e delle possibilità di servirsi di queste funzionalità all’interno del mondo estremamente ridotto dei dispositivi mobili comporta un rischio: progettare un software che poi non sia funzionale o che proprio non funzioni.
In questo e nel successivo articolo vedremo proprio questo argomento, cominciando su questo numero a spiegare nel dettaglio come funzionano i sistemi di geolocalizzazione, in maniera da avere tutti gli elementi necessari per progettare al meglio un’applicazione per dispositivi mobile funzionante.
Lo stato dell’arte
Sentendo la parola “geolocalizzazione”, si associa subito l’idea al GPS e all’impiego dei satelliti. In realtà c’è da dire che la determinazione della posizione tramite satellite non è l’unica tecnica possibile applicabile ai dispositivi mobili; è però — e se ne farà menzione nell’articolo — al momento l’unica abbastanza “pratica” e che fornisce un livello di accuratezza “accettabile” per quasi tutte le applicazioni orientate alla navigazione dei veicoli (marini, aerei o terrestri).
Non si può escludere però che la tecnologia nei prossimi anni offrirà alternative, rispetto all’uso dei satelliti, a favore di tecniche di rilevamento basate su segnali di superficie (p.e. reti degli operatori mobili) per la navigazione di veicoli terrestri, in pratica fin dove c’è copertura del “segnale”.
Quindi pur tenendo gli occhi aperti sulle evoluzioni tecnologiche del settore, per ora non resta che concentrarci sull’uso del GPS. Personalmente ritengo, ed è il motivo per cui in questo articolo ho voluto spingermi anche nella descrizione delle tecniche di miglioramento della precisione del rilevamento da GPS, che questa tecnologia, combinata con i servizi offerti dalle reti trasmissive terresti, potrebbe ottenere un ottimo revamp a costi bassissimi ed essere utilizzabile con buoni risultati ancora per molti anni.
Global Positioning System
GPS è la sigla di Global Positioning System ed è ormai entrato nel linguaggio comune come il sistema che consente di calcolare la posizione di un punto sulla superficie terrestre tramite informazioni trasmesse da appositi satelliti; se programmate di andare su Marte, il sistema che dovrete adottare sarà il Mars Positioning System: chissà se Elon Musk si è ricordato di aggiornare il navigatore della Tesla Roadster…
Concessioni linguistiche a parte, l’uso del termine GPS come sinonimo di sistema di navigazione basato su satelliti sarebbe errato perché si applica solo per il progetto del Dipartimento della Difesa degli Stati Uniti (DoD) che lo ha ideato e iniziato la realizzazione con il lancio dei primi satelliti nel 1978.
Ad oggi, infatti, ci sono altri operatori che hanno lanciato satelliti per la georeferenziazione in ambito sia civile che militare. In particolare sono già operativi il sistema GLONASS (russo), GALILEO (europeo), BEIDOU (cinese) e QZSS (giapponese).
Satelliti di tutto il mondo…
Lo hardware dei moderni dispositivi mobili è in grado di sfruttare le informazioni combinate da più sistemi satellitari, in modo da aumentare le possibilità di rilevamento con la massima accuratezza. Sul cielo italiano ormai non è inusuale avere oltre venti di questi satelliti sempre presenti in qualsiasi momento dell’anno.
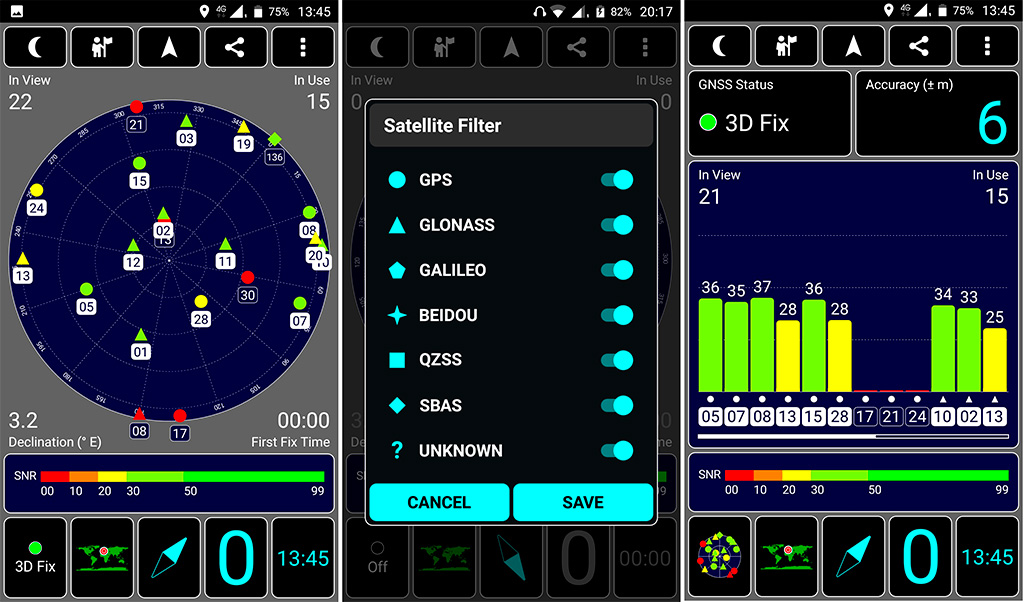
Per cominciare a giocare con questi concetti, potrebbe essere utile installare sui vostri dispositivi un’applicazione che esegue il rilevamento della posizione e fornisce, in modo grafico, semplice e intuitivo le informazioni sui satelliti e le loro posizioni nella volta celeste. Negli esempi che riporterò in seguito faccio uso dell’app “GPS Test” della Chartcross Ltd disponibile su Play Store.
Un esempio dei dati visualizzati è riportato in figura 1, dove si possono vedere le posizioni dei satelliti visibili sulla volta celeste marcati in base al tipo di operatore.
Metodi di georeferenziazione da satellite
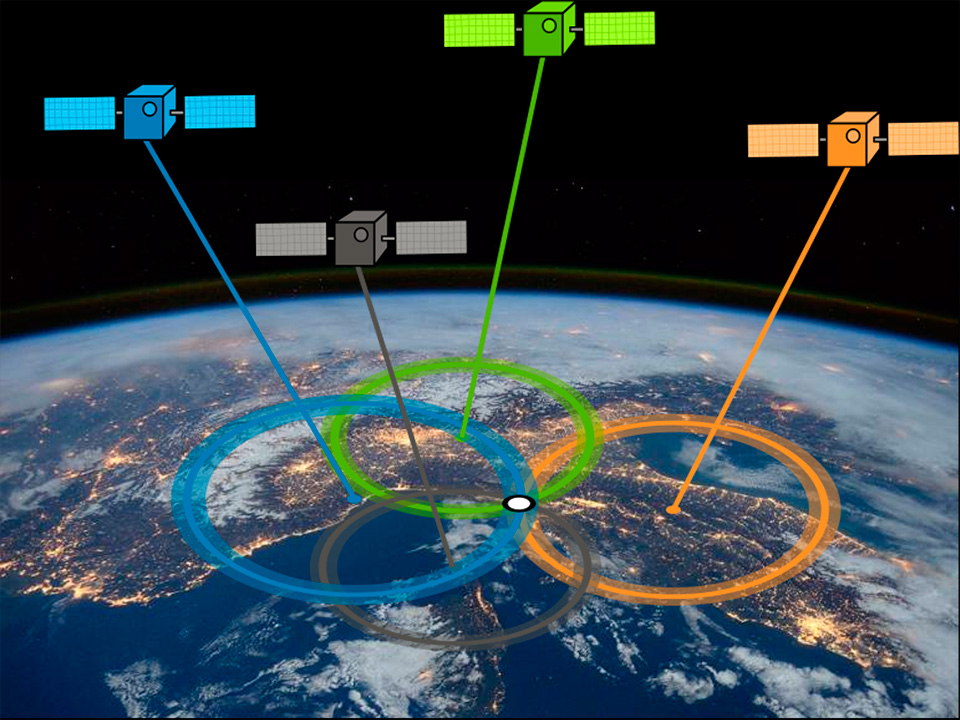
Il principio su cui si basa il calcolo della posizione di un punto nello spazio è molto simile a quello della trilaterazione. Fissato un sistema di riferimento, se conosciamo la distanza di un punto p, di posizione sconosciuta, da altri noti, possiamo, per intersezione delle superfici sferiche con centro nei punti noti e raggio le distanze calcolate con p, determinarne le coordinate.
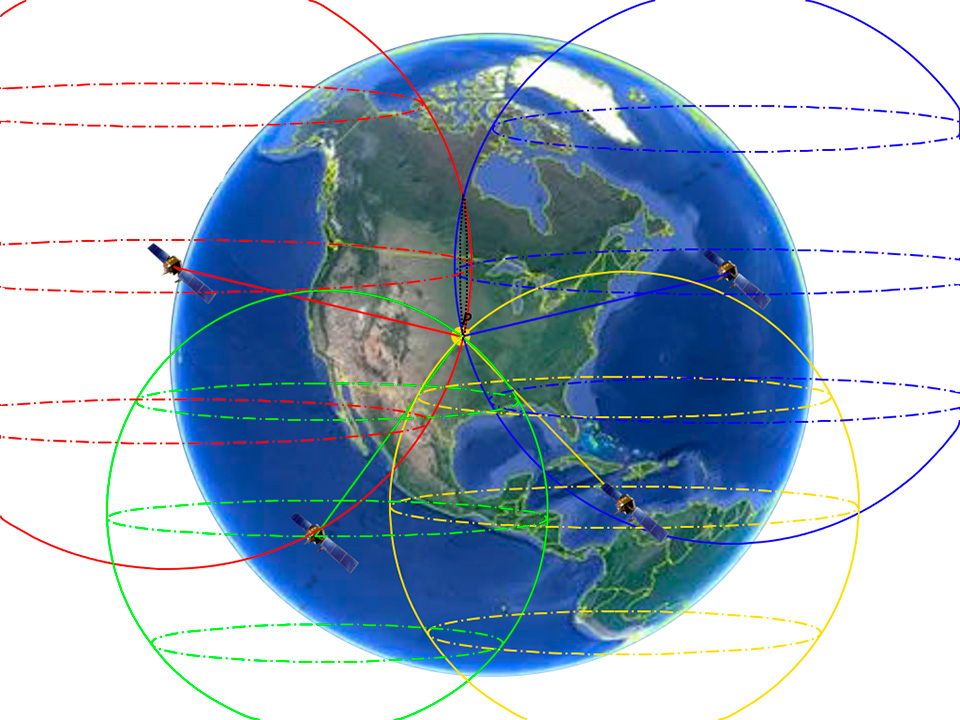
Trilaterazione rispetto a 4 punti noti
Fin qui sembra un problemino semplice di geometria e anzi si arriva presto alla conclusione che se conoscessimo la distanza tra ciascuno di noi e almeno 4 satelliti potremmo calcolare la nostra precisa posizione nello spazio:
- con 1 non sapremmo dove siamo posizionati in tutta la superficie sferica che rappresenta la distanza tra noi e il satellite;
- con 2 avremmo 2 superfici sferiche che si intersecano e potremmo avere come soluzione una circonferenza di punti nello spazio;
- con 3 la superficie sferica intersecherebbe la circonferenza di prima in al più 2 punti;
- e, per risolvere l’ultima ambiguità, serve un quarto satellite.
Un esempio grafico del calcolo è riportato in figura 2.
In realtà già considerando 3 satelliti avremmo che i due punti, che sono la soluzione al problema, sono posizionati lungo un asse ortogonale al piano formato dai tre satelliti: uno rivolto verso la Terra e l’altro rivolto verso lo spazio esterno. Chiaramente il punto esterno è da scartare perché si troverebbe per assurdo sopra le orbite dei satelliti dove non può arrivare nemmeno il segnale trasmesso (perché le antenne sono rivolte verso la Terra).
Il punto sulla superficie terrestre
Il passo successivo è quello di portare il punto nel sistema di riferimento terrestre a noi noto ossia latitudine, longitudine e altitudine; eh sì, c’è anche l’altezza sul livello del mare… Questo è un altro passaggio geometrico che ha lo scopo di proiettare il punto su una superficie ellissoidale in modo da ricavarne le coordinate sul nuovo sistema di riferimento.
La superficie ellissoidale in questione serve ad approssimare al meglio la superficie della Terra considerando i punti sulla superficie come posti allo zero altimetrico. Negli scorsi due secoli, ogni area del globo faceva riferimento a un ellissoide differente, ma ai giorni nostri esiste ormai qualche decennio un ellissoide di riferimento adottato in tutto il mondo per approssimare la forma della superficie terrestre. Questo standard è il WGS84 (World Geodetic System 1984) introdotto nel 1984 e questa sigla spesso ritorna quando si parla di GPS o anche semplicemente di rappresentazione di punti su mappe.
Misurare le distanze
Ma come si può determinare con sufficiente precisione la distanza tra un punto e un satellite? La chiave sta nella misura del tempo intercorso tra la trasmissione di un segnale emesso dal satellite e la ricezione al punto di misura.
Per fare questo, ogni satellite invia un segnale rappresentato da una semplice sequenza binaria che appare del tutto casuale ma in realtà è una sequenza ben nota che si ripete con una lunga periodicità (pseudo-random). È come la registrazione di una serie di toni in una traccia audio che vengono emessi dal satellite a partire da un precisissimo istante. Un ascoltatore, udendo la sequenza dei toni ed essendo questi praticamente non ripetibili, potrebbe capire a che istante della traccia è arrivata la riproduzione.
Questa sequenza è assolutamente caratteristica di ciascun satellite per cui, dopo un determinato periodo di osservazione, che serve al rilevatore per determinare a che punto della sequenza il satellite è arrivato con la trasmissione, si è in grado di stabile l’orario a cui il satellite lo avrebbe emesso; confrontandolo con l’orologio del rilevatore si è in grado di determinare per differenza il tempo Δt intercorso tra trasmissione e ricezione. Un esempio di questo calcolo è riportato in figura 3.
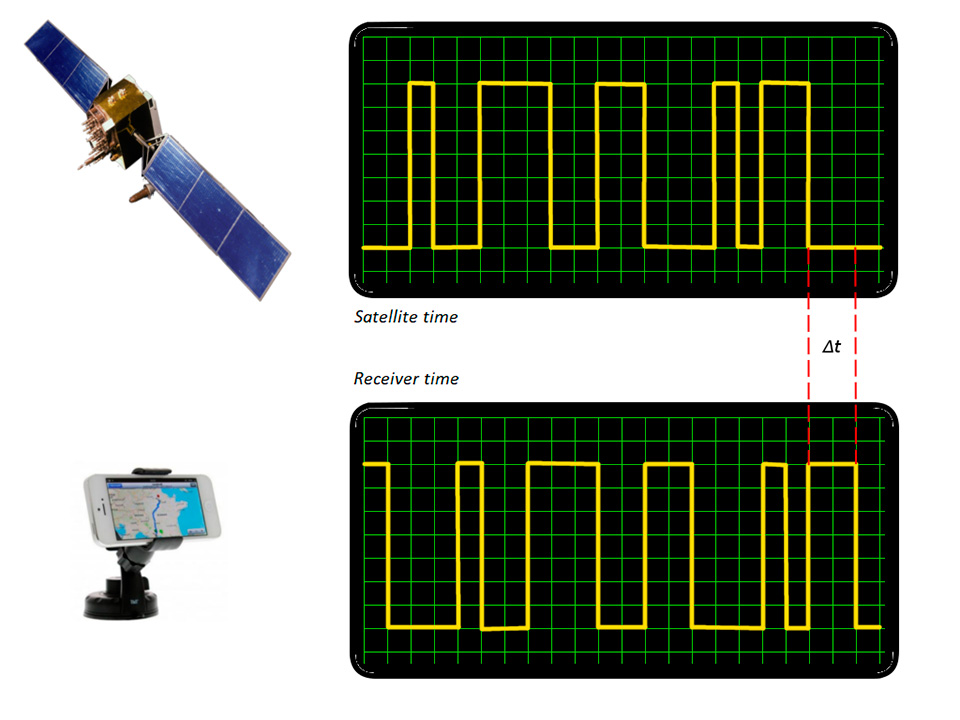
Figura 3 – Calcolo dell’intervallo di tempo nella trasmissione di pseudo-codice.
Come funziona il calcolo
Considerato, con una piccola approssimazione, che il segnale viaggia alla velocità v di 300.000 km/s, lo spazio percorso (e quindi la distanza tra il punto e il satellite) è d = vΔt.
Il controllo dell’emissione della sequenza dal satellite è affidato a degli orologi atomici a bordo che riescono a misurare il tempo con una precisione di gran lunga inferiore al nanosecondo, mentre i rilevatori GPS dei dispositivi mobili in genere utilizzano frequenze di riferimento tra le decine e centinaia di MHz. Per fare un semplice esempio: se si usasse una sorgente con una frequenza di 300 MHz, la “tacca” più piccola sul nostro righello dello spazio sarebbe:
300.000 [km/s] / 300.000.000 [s–1] = 0,001 km = 1 m
Questa precisione si ripercuote nel calcolo indicato per la determinazione del punto: non dobbiamo considerare l’intersezione di superfici sferiche ma di corone sferiche e quindi il calcolo finale dà come risultato il volume determinato dall’intersezione di queste corone.
In figura 4 è riportato un esempio, per semplicità considerando un caso su un piano, dell’area che si forma dall’intersezione delle corone circolari che rappresenta il luogo dei punti (segnata in giallo) che sono la soluzione del problema.
A questo punto il rilevatore GPS è in grado di fornire le coordinate di un punto e una precisione che intende approssimare al meglio questo volume.
Migliorare la precisione
Avendo a disposizione più satelliti come riferimento, maggiori sono le corone che si devono intersecare, per cui il volume finale viene ridotto il più possibile e, sulla base della configurazione delle posizioni dei satelliti — meglio se disposti uniformemente in ogni direzione rispetto a noi — possiamo arrivare vicini alle precisioni limite dello strumento che dipendono quasi essenzialmente dalla precisione nella misurazione del tempo.
Sembra però che uno dei grandi vincoli sia quello di avere l’orologio del dispositivo sempre accuratamente preciso. In realtà anche questo limite è risolto con qualche trucco; infatti, se per esempio l’orologio del rilevatore fosse leggermente “indietro” le distanze calcolate apparirebbero “accorciate”. Ne potrebbe risultare che, dal processo di calcolo, le corone sferiche non abbiano volume di intersezione. Questo però è impossibile e quindi il rilevatore GPS procede nel ricalcolare il tempo quanto basta per soddisfare che le corone sferiche abbiano un buon volume di intersezione. L’errore introdotto nel variare il tempo in questo modo, avendo un buon numero di satelliti, non supera la precisione limite dello strumento.
Questo passaggio può impiegare molto tempo se non c’è certezza assoluta sull’orologio del rilevatore. Per questo motivo molti rilevatori GPS installati sui dispositivi mobili utilizzano le risorse di rete per ottenere almeno un orario più preciso e una vaga posizione che consenta di determinare quali satelliti dovremmo avere “visibili” sulla volta celeste. Le informazioni sono reperibili dalla rete degli operatori mobili considerando che di ogni antenna è perfettamente nota la posizione. Questo espediente, noto come Assisted-GPS (AGPS), ha lo scopo di aiutare il rilevatore GPS ad essere più rapidamente in grado di rilevare una posizione ma non è in grado di aumentarne la precisione.
Infine, altro vincolo, sembra essere quello di conoscere esattamente la posizione dei satelliti al momento della trasmissione del segnale per proiettare correttamente il punto determinato sull’ellissoide di riferimento.
Questo problema è risolto dal satellite stesso inviando, su un differente canale, ogni 30 secondi i propri dati telemetrici che includono anche le proprie effemeridi. In questo modo, avendo anche una buona precisione del tempo, è possibile calcolare la posizione del satellite nella sua orbita.
Calcolare la posizione, in pratica
Tutto molto interessante. Ma con questo principio, che modi pratici ci sono per calcolare la posizione di un rilevatore?
GNSS
GNSS (Global Navigation Satellite System) implementa in pratica l’algoritmo descritto in precedenza senza aggiungere tanto altro. Questo metodo ha il vantaggio di non avere bisogno di nessun aiuto esterno e basta un solo rilevatore.
Inoltre, una volta tarato il processo — determinare il tempo locale e le effemeridi può richiedere diverse decine di secondi —, la posizione è calcolabile di continuo istantaneamente anche se si è in movimento e quindi è un metodo valido anche per calcolare la velocità istantanea e relativa direzione.
Non consente tuttavia una particolare precisione perché, anche se lo strumento ne fosse in grado, ci sono dei fattori non eliminabili da questo metodo che portano a considerare la precisione offerta non migliore dei 5 metri di approssimazione.
Questi fattori sono essenzialmente dovuti al passaggio del segnale nella ionosfera e nella troposfera come mostrato in figura 5.
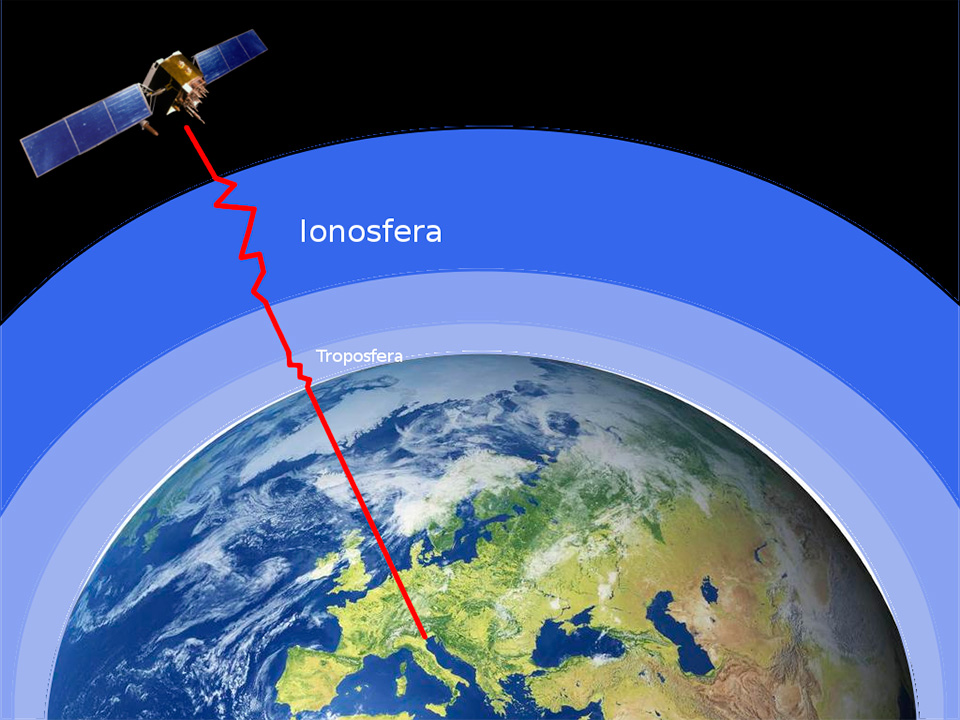
In queste parti dell’atmosfera terreste il segnale può subire deviazioni casuali che introducono un ritardo sensibile. Il fattore di ritardo non è costante o sempre uguale per ogni satellite, per cui il calcolo finale non può essere corretto in qualche modo.
Limitandosi a queste precisioni, i rilevatori GPS che usano questo metodo sono anche relativamente economici non avendo bisogno di componenti estremamente precisi e quindi costosi.
DGNSS
DGNSS (Differential GNSS) si basa sulla considerazione che due rilevatori GPS a terra abbastanza vicini (nell’ordine di pochi km) avranno visibili sulla volta celeste gli stessi satelliti e quindi l’influenza derivata dal passaggio dei segnali per la ionosfera e la troposfera si fa sentire su entrambi allo stesso modo.
Se di uno dei due rilevatori è esattamente nota a priori la posizione, la stessa differenza di lettura tra la posizione rilevata e quella nota si deve applicare anche all’altro rilevatore.
In questo modo il secondo rilevatore può, applicando tale correzione, determinare il punto con maggiore precisione, questa volta dipendente quasi esclusivamente dalla bontà del rilevatore GPS che, come abbiamo visto, può aggirarsi attorno al metro.
Per realizzare questo sistema c’è bisogno che il rilevatore GPS possa ricevere i dati di correzione (RTCM) da una stazione fissa tramite un canale dedicato per la trasmissione dati (figura 6).
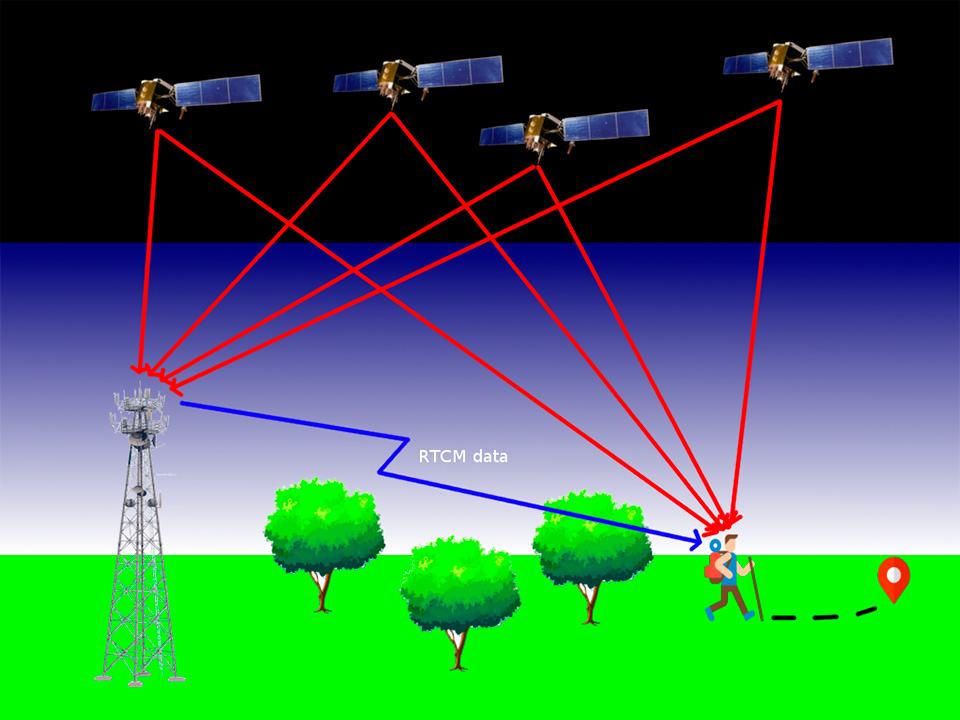
Esistono delle implementazioni accessibili pubblicamente tramite Internet che forniscono i dati delle correzioni GNSS. Ad esempio la regione Veneto — tramite un servizio on-line registrandosi sul sito dedicato [7] — in collaborazione con l’Università di Padova fornisce un servizio gratuito che consente di ottenere i dati in formato NTRIP (Networked Transport of RTCM via Internet Protocol) di 30 stazioni dislocate sul territorio della Regione. Analogamente fanno anche tutte le altre regioni in modo più o meno simile.
Nel caso di dispositivi mobili, l’accesso a Internet è una delle funzioni primarie per cui si potrebbe beneficiare di questa possibilità con un costo bassissimo. Tuttavia, come si evince dal fatto che i servizi di GNSS sono offerti a livello locale e in maniera disomogenea, la possibilità di utilizzare queste risorse per delle applicazioni GPS-based di un generico dispositivo mobile su scala mondiale è alquanto difficoltoso. Attualmente sembra operativo a livello internazionale un servizio offerto da Hexagon AB, con un costo annuo di circa 300 euro, più che altro orientato ad applicazioni di rilevamento topografico.
Se questa funzione venisse invece assolta dagli operatori mobili, la situazione potrebbe essere ben diversa. Infatti per un dispositivo mobile accedere ad una rete di trasmissione è il primo dei suoi scopi e per farlo ha bisogno di agganciare una cella di un operatore. La cella è caratterizzata da una antenna fissa che, per ragioni di qualità del segnale, non può distare mai più di qualche chilometro e la cui posizione potrebbe essere determinata a priori con precisione topografica (pochi cm).
Se l’antenna fosse dotata anche di un rilevatore GPS e trasmettesse a tutti i cellulari agganciati i dati delle correzioni da applicare, potremmo avere un comodo sistema di DGNSS a costo praticamente zero su scala globale.
I vantaggi del DGNSS sono gli stessi del GNSS per quanto riguarda — una volta completato il periodo di decine di secondi necessario per l’avvio del processo — il rilevamento istantaneo della posizione e della velocità di moto, ma con in più una precisione di gran lunga migliore.
RTK
RTK (Real-Time Kinematic) è un metodo di misura che consente di arrivare anche al centimetro di precisione. Per ottenere questo tipo di precisione, si entra nel dettaglio della modulazione del segnale trasmesso dai satelliti.
Infatti nel GNSS la misurazione della distanza si calcola analizzando lo pseudo-codice rappresentato dalla sequenza binaria di informazione trasmessa, mentre nel metodo RTK si considerano anche fattori legati alla modulazione del segnale per cui le soluzioni possibili sono, nell’interno del range determinato con il metodo GNSS, sui fronti d’onda del segnale modulato.
Le frequenze di modulazione dei segnali sono 1575,42 MHz e 1227,60 MHz che portano ad avere lunghezze d’onda rispettivamente di 19 e 24 cm. Nel metodo RTK si cerca di ottenere il posizionamento contando il numero di cicli necessari per coprire la distanza tra il satellite e il punto in rilevamento e, per farlo con assoluta precisione, è necessario un riferimento noto come nel caso del DGNSS. Impiegando entrambe le sorgenti di segnale è possibile arrivare a determinare un punto con una precisione di qualche centimetro.
Un sistema di misurazione così preciso richiede particolare ingombro e componenti molto costosi. Nel caso di rilevatori GNSS, infatti, parliamo di una decina di euro ed esistono in commercio diversi chip già montati su schede per essere utilizzati con microsistemi come Arduino o RaspberryPI. Ma quanto ci spostiamo nel campo dei sistemi RTK, il costo lievita fino a svariate centinaia o a migliaia di euro.
WiFi RTT
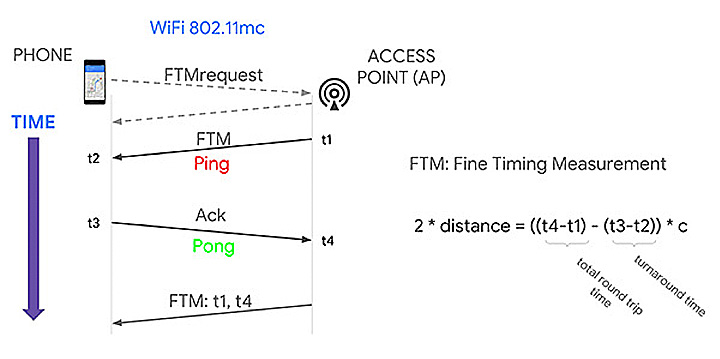
WiFi RTT (Round Trip Time) è stato introdotto con la specifica IEEE 802.11mc nel 2016 [4] ed è ormai implementata da quasi tutti i vendor di access point WiFi. Il concetto che sta alla base di WiFi RTT è molto simile a quello della trilaterazione già descritto per il calcolo della posizione da satellite. Il calcolo della distanza dal rilevatore all’access point avviene però mediante la misura del round trip time.
Questa funzione è molto simile a quella ben nota di ping: l’unica differenza è che il rilevatore non opera a livello di IP ma al livello di rete che è più basso. Infatti il rilevatore ha bisogno di avere i dati da tutti gli access point disponibili nel suo raggio di azione per avere il maggior numero di tempi misurati allo scopo di determinare un punto con precisione.
Inoltre, per rendere la misurazione il più possibile indipendente dallo sfasamento degli orologi del rilevatore e dell’access point, il calcolo del tempo intercorso si basa su una coppia di passaggi (ping e pong) come mostrato in figura 7. I termini t4-t1 eliminano l’offset relativo all’access point mentre i termini t3-t2 eliminano l’offset relativo al rilevatore. Il tempo risultante è quindi il tempo impiegato dal segnale — viaggiando alla velocità c della luce) a percorrere due volte la distanza tra il rilevatore e l’access point.
Come nel caso della trilaterazione nel GNSS, ci vogliono almeno 4 access point per determinare un punto, anche se ne potrebbero bastare 3 nel caso si considerino applicazioni solo su superfici limitate e in piano. La misurazione del tempo è molto accurata perché dipende tutto dall’orologio del rilevatore e, come nel caso del calcolo del GNSS, si può arrivare a precisioni dell’ordine del metro.
Implementazioni e applicazioni nei dispositivi mobili: considerazioni
L’introduzione del WiFi RTT è relativamente recente. È stata integrata negli smartphone Android a partire dalla versione P uscita a metà del 2018. Sicuramente è una tecnologia di interesse per applicazioni indoor, dove il segnale GPS comunque non è disponibile, e in edifici dove si sia prevista l’installazione di un numero sufficiente di access point. È quindi una tecnologia che si orienta ad applicazioni domotiche o allestimenti multimediali in edifici di grandi dimensioni, penso ad esempio a musei.
La precisione offerta la renderebbe adatta anche per applicazioni di navigazione veicolare, ma ci sarebbe bisogno di implementare una rete di access point conforme la specifica IEEE 802.11mc anche all’esterno. E chi si potrebbe occupare di implementare una tale rete? Dato che la specifica richiede la trasmissione di piccoli pacchetti per ogni veicolo, c’è da aspettarsi che, con migliaia di veicoli gestiti, la banda occupata da questo servizio sia consistente. Per questo motivo mi sentirei di escludere la possibilità che gli operatori di reti mobili possano offrirlo in qualche modo anche se la tecnologia delle trasmissioni prossima futura del 5G lo consentisse.
Lungo le autostrade potrebbero essere le concessionarie a implementarla come servizio aggiuntivo a tanti altri a valore aggiunto come l’autorizzazione all’accesso alla rete autostradale, il pagamento telematico del pedaggio, il rilevamento del percorso reale — una direttiva europea — e un sistema per la guida assistita allo scopo di ridurre gli incidenti. Rimarrebbero comunque escluse al momento le altre strade, per cui l’applicazione potrebbe essere adatta al traffico merci rispetto a quello degli utenti privati.
Inoltre sono già in corso delle evoluzioni tecnologiche che possono dare altre soluzioni alle esigenze legate alla viabilità come il riconoscimento video dei veicoli e la guida automatica basata su sensori radar e ottici. Tutto ciò mi fa pensare che l’applicazione reale del WiFi RTT resterà per lungo tempo limitata alle applicazioni indoor.
D’altra parte tutti gli smartphone sono dotati di rilevatore GPS anche se l’implementazione tipica è basata sul solo GNSS che è quella con la peggiore precisione tra le varie possibili. Al momento le applicazioni per la navigazione dei veicoli hanno usato al meglio questa precisione ma, per andare oltre al semplice navigatore che fornisce la strada da percorrere a un conducente, il quale ha comunque modo di discriminare il problema della precisione dell’indicazione fornita, è necessario fare dei miglioramenti che sarebbero già buoni semplicemente applicando il metodo del DGNSS.
Il costo nell’implementare tale tecnologia negli smartphone è minimo, ma è necessario che ci siano delle sorgenti world-wide che forniscano i dati RTCM in tempo reale. Date le risorse esigue in termini di consumo di banda e di apparati da implementare, sarebbe auspicabile che in futuro gli operatori di reti mobili lo forniscano assieme ai servizi di accesso alla rete, oppure la possibilità di avere dei servizi gratuiti a livello nazionale/internazionale simili a quelli offerti dalla regione Veneto.
Quanto all’RTK… è abbastanza impensabile che si potrà implementare a livello mobile un sistema di posizionamento basato su RTK, perché occorre contenere sia il costo che l’ingombro degli smartphone; tuttavia l’evoluzione tecnologica sta portando allo sviluppo di componenti sempre più sofisticati che consentono di migliorare la precisione anche usando il solo GNSS (e ancora meglio quindi se DGNSS).
Sviluppi futuri
Ad esempio, a metà 2018, Broadcomm ha messo in commercio il chip BCM4775X che sfrutta la combinazione del calcolo su più frequenze di segnale senza per questo prosciugare la batteria. Il risultato è una precisione “lane-level”, ossia adatta alla navigazione veicolare su strada, che tipicamente è inferiore al metro.
Se però parliamo di navigazione veicolare, perché pensare agli smartphone? Gli smartphone sono dispositivi mobili adatti all’uso personale, mentre se parliamo di veicoli è ormai abbastanza certo che nel futuro prossimo le auto avranno già un loro sistema di bordo che sarà sicuramente più avanzato rispetto ai dispositivi portatili.
Infatti un computer di bordo non deve fare i conti con i problemi di spazio e di energia di un normale smartphone e possono essere utilizzati componenti più costosi dato che il costo finale verrebbe “assorbito” dal prezzo dell’intero veicolo. In sostanza, parlare di precisione centimetrica per un veicolo è una cosa al giorno d’oggi praticamente già realizzabile anche usando il normale GPS.
Conclusioni
In questa prima parte di articolo si è voluto dare un’ampia panoramica sulle tecnologie di rilevamento della posizione utilizzando le possibilità tipiche dei dispositivi mobili.
Si è visto come l’impiego del GPS risulti ancora il più pratico per le applicazioni di navigazione veicolare, anche se al momento le possibilità offerte da questa tecnologia sono sfruttate molto al di sotto delle capacità possibili, mancando l’integrazione con strutture di appoggio per implementare tecniche di rilevamento accurate come il DGNSS.
Nonostante ciò, bisogna ancora confrontarsi con i limiti dovuti alle reali implementazioni di questa tecnologia all’interno del mondo dei dispositivi mobili: e tutto ciò sarà l’argomento del prossimo articolo.