

Dopo la preparazione sulle tecnologie aerospaziali, e l‘incontro con lo stimolante mondo della robotica spaziale, il viaggio del nostro autore continua con l‘arrivo in Giappone, presso l‘Università di Tohoku. Tra gap culturali, smarrimenti in un mondo nuovo e scoperte tecnologiche, il progetto della creazione di El Dorado finalmente può cominciare a prendere corpo.
L’arrivo
Arrivai in giappone in una notte di pioggia, con la netta impressione di essere entrato in un universo parallelo. Confuso dal volo e dal cambio di fuso orario, cercavo di processare la tempesta di informazioni che assaliva i miei sensi. Provate a immaginare cosa può voler dire trovarsi in un ambiente tutto sommato “normale”, cui siamo abituati, come può essere un aeroporto internazionale, avendo però nel contempo la sensazione che qualcosa non torni. Le voci attorno a te formano un brusio indistinto di cui non riesci a cogliere il significato. I tuoi occhi si spostano rapidamente in ogni direzione, cercando inutilmente di trovare un messaggio familiare in mezzo a mille luci e colori. Schermi giganti presentano spot pubblicitari criptici, di cui è impossibile identificare i volti, il messaggio e il prodotto. La gente ti passa attorno e, per la prima volta in vita tua, ti rendi conto di cosa voglia dire fare parte di una minoranza etnica.

Provai a chiedere informazioni, e mi resi conto che nessuno attorno a me parlava l’inglese. I giapponesi hanno un rapporto particolare con la lingua inglese: molte parole di origine moderna sono di chiara derivazione inglese, ma pronuncia e modalità di utilizzo sono state, diciamo così, “localizzate”. Quando, dopo secoli di isolamento, nella seconda metà dell’Ottocento il Giappone si aprì all’Occidente, molti oggetti, materiali, concetti, che non esistevano nella cultura tradizionale nipponica, furono presi in prestito dall’inglese. Il “vetro” come lo intendiamo noi, nel Paese del Sol Levante non esisteva: si prese quindi in prestito la parola “glass”, che però in giapponese diventa, più o meno, “garasu” (con la prima “a” e la “u” appena accennate. Infatti, la lettera “l” viene pronunciata “r”, le sillabe vengono contratte e gli accenti spostati, fino a rendere la parola irriconoscibile.
La lingua giapponese ha una struttura grammaticale completamente diversa da quella delle lingue occidentali. La grammatica giapponese è estremamente semplice, e non comprende costrutti come la coniugazione, che è sottointesa dal soggetto della frase (“io mangiare”). Il risultato è una sorta di nuova lingua, soprannominata “Engrish”, fonte di ilarità nel mondo anglofono. Per fare un esempio, vidi in aeroporto una ragazza con una maglietta colorata con l’immagine di una donna discinta e la scritta “Fungal!”: l’intenzione era ovviamente quello di mostrare la propensione al divertimento della proprietaria della maglietta – una “Fun Gal” – mentre il messaggio che effettivamente traspariva era l’allarme verso una possibile contaminazione micotica – “Fungal”, perl’appunto.

Qualche foto scattata durante il mio soggiorno, comunque, contribuisce a spiegare il senso di “straniamento” che, almeno all’inzio, è piuttosto comune incontrare da parte del viaggiatore occidentale che arrivi in Giappone.
Esiste un buon numero di siti web dedicati a questa speciale “forma d’arte” rappresentata dall’Engrish, ed è consigliabile una visita almeno al sito più noto [1].
Orientarsi in Oriente
Vidi un cartello con il simbolo del treno, e lo seguii fino a trovare un punto informazioni. Con gran sollievo riuscii ad acquistare i biglietti per Sendai. La comunicazione avvenne per iscritto, dato che l’operatore non parlava nè inglese nè “Engrish”. Chiesi dove potevo trovare un ATM – un bacomat – ed ebbi una nuova sorpresa: gli ATM dell’aeroporto non accettavano carte internazionali. Ma non era finita qui: come ebbi modo di scoprire nei giorni successivi, gli ATM seguono orari di ufficio, e pertanto sono chiusi nei finesettimana e dopo le cinque di sera. L’economia giapponese è saldamente ancorata al denaro contante: il denaro elettronico è una eccezione che viene tollerata solamente negli esercizi più esposti a una clientela internazionale, come biglietterie, gioiellerie o ristoranti di lusso.
In capo a mezz’ora, mi trovai sul treno per Sendai confuso, senza un soldo e senza aver trovato il modo di chiamare Yoshida per confermare l’orario del mio arrivo. Il roaming GSM non funzionava, e privo del familiare supporto del telefono cellulare mi sentivo solo in mezzo ai miei guai. A questo punto ebbi però una dimostrazione di una virtù giapponese difficile da trovare altrove: il senso di ospitalità. Mi feci coraggio e provai a chiedere a un gruppo di ragazzi se mi potevano aiutare. I giovani conoscono l’inglese, lo sanno leggere piuttosto bene, ma fanno una grossa difficoltà a comprendelo e sono estremamente timidi nel parlarlo. Usando un linguaggio internazionale composto da gesti e alcune parole chiave, spiegai a questo gruppo di ragazzi che ero appena arrivato dall’Italia, che non avevo soldi e che dovevo fare una telefonata. Divertiti dalla strana lingua che stavo usando, i ragazzi fecero del loro meglio per capire cosa stavo dicendo, e quindi mi passarono un telefono che sembrava un videopoker. In questo modo riuscii a chiamare Yoshida, e a mettermi daccordo su come incontrarci in stazione.
A Sendai
Arrivai nel mio appartamento a Sendai all’una di mattina del 24 maggio, giorno del mio trentasettesimo compleanno. La parola “appartamento” è un attimino sovradimensionata alla realtà che mi trovai di fronte: una camera da 10 metri quadri, completamente priva di arredamento tranne per un “futon”, un letto da pavimento. Il bagno era una stanza grande come una cabina telefonica, arredata con un kit doccia-lavandino-water della Yamaha. Chiesi a Yoshida se c’era la possibilità di ricevere internet in qualche maniera, ma lui mi scoraggiò dati i tempi e la burocrazia necessari. Era chiaro che non ero venuto in Giappone per il lusso della sistemazione.

Da solo in una camera di 10 metri quadri, incapace di distinguere il giorno dalla notte, celebrai solennemente il mio compleanno con una tortina di riso, pensando a tutta la strada percorsa nell’anno passato.

I robot del Sol Levante
La mattina successiva ebbi modo di scoprire perchè il Giappone viene chiamato “Paese del Sol Levante”. Mi svegliai che il sole era già alto, e quando guardai l’orologio vidi che erano appena le quattro e mezza di mattina, ora locale. Il Giappone segue un fuso orario che, geograficamente, è spostato a Ovest, e non applica l’ora legale. Pertanto, gli orari estivi sono spostati di due ore rispetto alle nostre abitudini: in maggio il giorno inizia alle 4 di mattina, e la notte alle 7 di sera. Confuso dal jetlag, e incapace di riprendere sonno, mi preparai per la mia prima giornata giapponese.

La facoltà di Robotica dell’Università di Tohoku sembra una versione geek e tecnologica di “Saranno Famosi”. A qualunque ora del giorno e della notte, gli studenti lavorano a perfezionare prototipi di robot di ogni forma e dimensione. E non pensiate che si tratti di raffinamenti su modelli CAD computerizzati: nei vari laboratori, questi universitari apportano modifiche usando tornio, morsa, martello e trapano, per poi spostarsi nel corridoio a effettuare i test. La loro familiarità con la meccanica è di gran lunga superiore alla loro competenza informatica: una volta ad esempio vidi creare da zero un nuovo supporto per una telecamera camera per risolvere un problema di parallasse che si sarebbe potuto gestire in 2 minuti modificando i parametri del software di controllo. Questa timidezza verso le tecnologie informatiche era per me una sorpresa. Nei giorni seguenti mi resi conto che si trattava di un problema serio, che aveva condizionato l’architettura del software di controllo del rover.

Primo incontro con El Dorado
Mi presentai ai ragazzi del laboratorio e cominciai a fare amicizia. Hiroaki Inotsume mi mostrò alcuni dei prototipi del laboratorio, e in particolare il robot sul quale avrei dovuto lavorare. Se siete nati negli anni Settanta come me, è probabile che abbiate una certa immagine mentale della robotica spaziale Giapponese. Avete mai visto Mobile Suit Gundam, l’originale del 1978 o una delle innumerevoli riedizioni apparse negli oltre trenta anni successivi? Ecco più o meno cosa mi aspettavo inconsciamente.
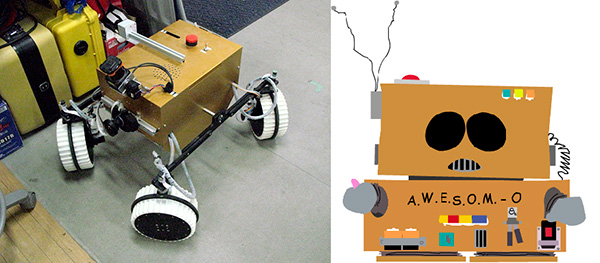
La realtà che mi trovai davanti aveva un glamour molto differente. El Dorado, il mio nuovo amico robot, era sostanzialmente un cassone di latta dorato con le ruote. Ma c’era qualcosa in quella forma squadrata, quel colore giallo scuro, quel pulsante rosso, qualcosa che mi risultava stranamente familiare. Avevo la netta sensazione di aver già visto quella macchina, ma non ero sicuro dove. All’improvviso un’illuminazione: “Ma questo è AWESOM-O!”, esclamai. In uno degli episodi più brillanti di South Park, il perfido Cartman si traveste da robot, AWESOM-O, per fare uno scherzo ai suoi amici. Gli unici a cadere nella trappola sono il povero Butters Stotch e tutti gli adulti della serie. Cartman si trova pertanto a essere conteso dagli studios di Hollywood, convinti di aver trovato un’intelligenza artificiale capace di generare a raffica soggetti per film comici con Adam Sandler, dal Governo degli Stati Uniti, interessato alle applicazioni militari di questa tecnologia superiore, e dal povero Butters, che non vuole perdere il suo amico robot.
Rincuorato da questo ritrovato senso di familiarità, mi feci spiegare le caratteristiche del sistema.
La sfida
El Dorado è un rover autonomo, utilizzato per ricerca su robotica planetaria. La parola rover denota una classe di robot che si move su ruote. Autonomo significa che la macchina è in grado, entro certi limiti, di prendere decisioni su come muoversi nell’ambiente, sia in termini di pianificazione del pecorso che in termini di implementazione delle direttive di movimento.
El Dorado dispone di quattro ruote motrici indipendenti, montate in un sistema di sospensioni di tipo rocker. Un sistema rocker monta le ruote di ciascun lato su una leva a bilancia che fa in modo che quando una ruota sale rispetto al baricentro della macchina, l’altra venga spinta verso il basso, in modo da sfruttare il peso del rover per favorire il superamento di ostacoli. Ogni ruota è dotata di una coppia di attuatori a velocità variabile, che permette di impostare velocità e angolo di sterzo in maniera indipendente per ciascuna ruota. Un array di sensori misura la distribuzione di forze di contatto attorno a ciascuna ruota, in modo da fornire informazioni in tempo reale che possono essere usate per migliorare la trazione su terreni sabbiosi
Oltre agli attuatori, ogni ruota dispone di un sistema di odometria, che misura velocità e angolo di sterzo effettivi. Questo dualismo attuatore-odometria è una delle nozioni fondamentali della robotica, che merita un breve approfondimento.
Come funziona il movimento
In un robot, ciascun movimento richiede una combinazione di impulsi temporizzati diretti agli attuatori della macchina. L’azione effettivamente eseguita da un attuatore dipende sia da caratteristiche tecniche dell’attuatore stesso, come la potenza, che da fattori esterni, come il tipo di ambiente esterno in cui il comando viene eseguito. Un’automobile ad esempio si comporta in maniera completamente diversa su asfalto asciutto o su sabbia: lo stesso impulso (velocità delle ruote) produrrà un risultato completamente diverso (accelerazione o slittamento). Per questa ragione il software di controllo di un robot è basato su un meccanismo a feedback: ogni movimento comporta l’invio di un impulso e la misurazione del progresso; la risposta dei sensori viene utilizzata dal software di controllo per comandare i succesivi impulsi agli attuatori.
El Dorado è equipaggiato con un telemetro laser, utilizzato per analizzare l’ambiente e creare una mappa digitale del rilievo “topografico” (Digital Elevation Map, DEM), un modello geometrico dell’ambiente che circonda il rover. Il rover è dotato di una telecamera IP, che può essere utilizzata per catturare filmati in tempo reale, e una scheda Wi-Fi, utilizzata per trasmettere la telemetria.
GLXP
El Dorado è il prototipo di rover che il consorzio White Label Space, di cui la Tohoku University fa parte, sta sviluppando per il Google Lunar X Prize, GLXP in breve. Il GLXP è un concorso bandito da Google che mette in palio 30 milioni di dollari a chi riuscirà a inviare un rover sulla Luna entro il dicembre 2014, farlo muovere per almeno 500 metri, fargli portare a termine un incarico di rilevanza scientifica e trasmettere alla Terra foto e filmati ad alta definizione. La luna dista quasi 400.000 km dalla Terra, e per questa ragione le comunicazioni radio subiscono un ritardo di circa due secondi tra l’invio di un impulso e la constatazione del risultato. Questo tipo di ritardo rende difficile il controllo in tempo reale, e incoraggia l’adozione di una modalità di controllo semiautonoma basata su pianificazione di percorso.

La pianificazione del percorso
Un sistema di pianificazione di percorso mette a disposizione dell’operatore un’interfaccia grafica che presenta le informazioni di stato e una rappresentazione tridimensionale dell’ambiente che circoda il rover. L’operatore dispone di strumenti di pianificazione che permettono di progettare un percorso attorno agli ostacoli visibili nel modello. Il percorso viene poi caricato nel rover, che lo esegue in modalità semiautonoma, utilizzando il feedback dei propri sensori per misurare il risultato. L’esecuzione può essere interrotta dall’operatore, che segue l’operazione con un ritardo di circa un secondo, o dal rover stesso, qualora disponga di meccanismi di riconoscimento di ostacoli. Quando il rover si ferma, le informazioni di stato aggiornate vengono inviate al sistema, in modo da aggiornare il modello e permettere all’operatore di pianificare il passo successivo.
Questa in sintesi era la sfida: avevo di fronte a me 11 settimane per riprendermi dal jetlag, valutare la situazione corrente, formulare un piano, implementarlo ed effettuare i test necessari. Ero fermamente intenzionato a trarre il massimo da quelle 11 settimane non solo in termini professionali, ma anche in termini di scoperta di un mondo, il Giappone, le cui immagini avevano popolato la mia infanzia, e che per la prima volta avevo la possibilità di vivere in prima persona.
Conclusioni
Tra shock culturali e sfide tecnologiche sui rover planetari, per questo mese è tutto: nel prossimo articolo faremo una panoramica della configurazione software che il rover aveva all’inizio dell’estate e discuteremo tutti i suoi limiti.
Riferimenti
[1] Un divertente sito dedicato al fenomeno dello “Engrish”
Andrea Gini è un professionista del settore aerospaziale, un consulente IT e un giornalista scientifico. La collaborazione con MokaByte, iniziata nel lontano 1999, è stata l‘unica costante in un percorso professionale che lo ha portato dalla fotografia professionale alla scienza spaziale. Attualmente lavora al Payload Safety Review Panel presso il centro di sviluppo tecnologico ESTEC dell‘Agenzia Spaziale Europea (ESA) a Noordwijk, nei Paesi Bassi. Andrea è anche fondatore ed editore responsabile dello Space Safety Magazine, un giornale specializzato pubblicato congiuntamente dall‘International Association for Advancement in Space Safety (IAASS) e dalla International Space Safety Foundation (ISSF). Nella IAASS, Andrea ricopre il ruolo di Chairman dell‘Information and Communication Committee, ed è responsabile dello sviluppo della strategia di comunicazione dell‘associazione. Nel tempo libero, ama stare con le figlie, cucinare, viaggiare, suonare con la chitarra, studiare le lingue e la storia contemporanea, abbracciare il suo cane e ascoltare la musica degli Who, dei Led Zeppelin, di Rihanna, 50 Cents, Eminem, Lady Gaga e Britney Spears.