

In questo terzo articolo, l‘autore ripercorre gli eventi che, dall‘università ISU lo porteranno finalmente in Giappone a realizzare software per la gestione dei rover planetari. Nella lunga parentesi sulle missioni lunari americane, vengono sviluppate delle interessanti riflessioni che si possono applicare a diversi campi delle discipline ingegneristiche, non ultima quella dello sviluppo del software.
In cerca di una vocazione
L’ISU è una università interdisciplinare, che ha l’obiettivo di fornire il contesto culturale in cui sviluppare la propria professionalità. Al di là di quanto viene insegnato, la curiosità e l’iniziativa personale svolgono un ruolo importantissimo nel percorso formativo. Nel corso del primo modulo, della durata di sei settimane, vengono passate in rassegna le tematiche che verranno approfondite nei successivi mesi: ciascuno è invitato a trovare un tema preferenziale da approfondire durante una ricerca individuale (il Personal Assignment) e da portare avanti nel corso dello stage estivo.
Al termine del primo modulo ero in uno stato di euforia. L’industria aerospaziale si apriva di fronte a me in tutte le sue straordinarie ramificazioni, offrendomi delle opportunità che non avrei mai pensato di avere. I racconti degli studenti dell’anno precedente mi avevano fornito ispirazione. Tra tutte le mete possibili per lo stage, avevo maturato l’idea di andare in Giappone. L’idea dello shock culturale a cui sarei stato sottoposto era di per se’ una buona ragione per andarci, ma ovviamente mi aspettavo anche di trovare un pretesto professionale che giustificasse la mia scelta.
A fine settembre, ci fu fatta una una lezione sulla robotica planetaria. Il soggetto catturò subito la mia attenzione, e decisi di documentarmi. Robotica e Giappone sembravano una accoppiata congeniale; pertanto andai a chiedere consiglio al Professor Tolyarenko, esperto di meccanica orbitale che aveva preso parte, tra il 1965 e il 1990, a tutte le piu importanti missioni del glorioso programma spaziale sovietico, incluso il programma segreto per lo sbarco sulla Luna, che venne chiuso nel 1974 senza che avesse portato a risultati. La menzione del programma lunare sovietico solleva immediatamente la questione del programma lunare statunitense, che ancora oggi suscita la curiosità del grande pubblico. Credo pertanto che sia opportuna una piccola parentesi.
Lo sbarco americano sulla Luna
La prima domanda che tutti mi fanno quando sentono che mi occupo di tecnologia spaziale è: “siamo davvero sbarcati sulla Luna?”. Con grande dispetto dei cospirazionisti, devo confermare. Tra il luglio 1969 e il dicembre 1972, 12 astronauti hanno messo piede sul suolo lunare, portando a termine sei missioni di difficoltà crescente. Il programma spaziale americano coinvolse circa mezzo milione di persone ad ogni livello della società americana, civili e militari, industrie private e centri di ricerca universitari. Sappiamo quanto sia difficile mantenere un segreto anche solo tra due persone, figuriamoci tra mezzo milione di individui.
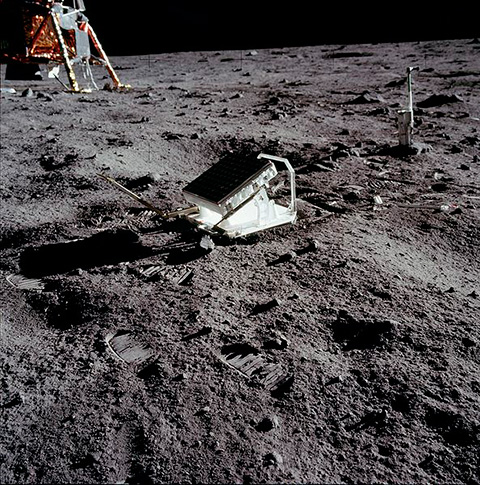
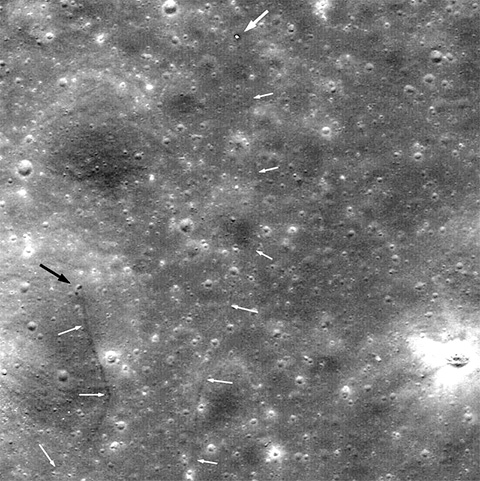
Ci sono diverse prove a sostegno delle missioni Apollo. Le rocce lunari, analizzate in laboratori di tutto il mondo, presentano una composizione geologica che non è riproducibile sulla terra. Gli strumenti lasciati sulla Luna, come i riflettori che permettono di misurare la distanza tra la Terra e il nostro satellite, sono ancora oggi utilizzati. Le trasmissioni radio tra la terra e la Luna sono state ricevute in diretta e triangolate da diversi radioamatori dell’epoca, sparsi in tutto il mondo. Le mappe ad alta risoluzione del suolo lunare, basate sui dati raccolti nel corso degli anni successivi agli allunaggi da diverse missioni internazionali e visibili su Google Moon, mostrano le tracce dei luoghi dell’allunaggio.
Ma la prova definitiva dell’autenticità delle missioni Apollo è la reazione sovietica. Il programma spaziale umano era la faccia pacifica della guerra fredda tra USA e URSS. L’Unione Sovietica, partita con un notevole vantaggio alla fine degli anni Cinquanta, aveva perso via via la capacità di competere con la tecnologia americana. Se ci fosse stata anche solo la minima irregolarità nelle missioni Apollo, missioni che l’Unione Sovietica monitorava con attenzione, la cosa sarebbe immediatamente divenuta pubblica.
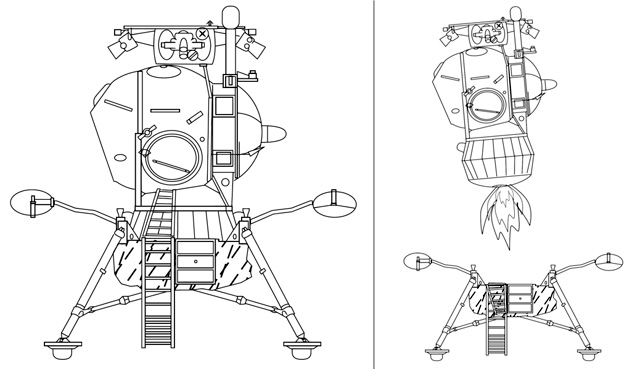
Ma allora come mai non ci siamo più tornati? L’obiettivo del programma Apollo era quello di battere i Russi nello sbarco sulla Luna entro la fine degli anni Sessanta. Per ottenere questo obiettivo nei tempi previsti, il Governo degli Stati Uniti mise a disposizione una quantità di risorse che non ha uguali nella storia dell’umanità: l’equivalente di 150 miliardi di dollari dei giorni nostri. Il programma Apollo era insostenibile sul piano economico e per questa ragione le ultime tre missioni vennero cancellate poco dopo lo storico sbarco di Neil Armstrong e Buzz Aldrin, nonostante l’hardware fosse già stato costruito e i piani fossero stati approvati. Il programma Apollo venne decommissionato, e i finanziamenti vennero dirottati in favore dello Space Shuttle che, sulla carta, prometteva di fornire un accesso economico allo spazio.
Una riflessione generale sulla conoscenza tecnologica
Quando una tecnologia viene abbandonata, gran parte della conoscenza accumulata durante il suo sviluppo viene dispersa. Questo tipo di conoscenza, racchiusa nelle menti e nelle braccia di tecnici e ingegneri che hanno lavorato giorno per giorno a svilupparla, legata alle industrie che ne hanno costruito i componenti, non può essere catturata da schemi progettuali validi per sempre. Questo fenomeno è comune anche nel mondo IT: quando lo sviluppo di un software o di una libreria viene interrotto, gli utenti tendono a migrare verso un altro prodotto, indipendentemente dal fatto che il codice sorgente resti a disposizione del pubblico. Pertanto, se oggi si volesse riesumare il programma Apollo da dove è stato interrotto, il costo totale non sarebbe molto diverso da quello che il programma ebbe negli anni Sessanta.
Per questa ragione, il principale obiettivo della politica spaziale del presidente Obama è di sviluppare delle nuove tecnologie che possano permettere, nell’arco dei prossimi trenta anni, di raggiungere il pianeta Marte a un costo ragionevole in un clima di collaborazione internazionale. La refrattarietà della politica a operare su orizzonti così lunghi getta dei pesanti dubbi sul possibile successo di questa iniziativa.

Uno scienziato russo
A differenza di molte università italiane, i professori dell’ISU lavorano a porte aperte. In qualunque momento è possibile presentarsi nel loro ufficio e chiedere attenzione: la disponibilità è immediata. Per sapere qualcosa di più sui rover planetari, in tutto l’istituto c’era la persona adatta a cui chiedere: il professor Nikolay Tolyarenko.
Nikolay Tolyarenko è il prototipo di scienziato pazzo tanto caro a mia figlia Laura. L’abbigliamento, jeans e giacca plaid con cravatta impresentabile, risulta fuori luogo tanto in contesto formale che in quello informale. Il suo lessico comprende un uso costante e spropositato delle parola “formally” (“formalmente”) che lui pronuncia “formely”, e “infeasible” (“infattibile”), che lui pronuncia “invisible”. I difetti di pronuncia del suo inglese non fanno altro che aumentare l’impatto dell’umorismo diretto, quasi cinico, con cui commenta le notizie del mondo spaziale, concludendo invariabilmente che “vita è vita.”

Una caratteristica comune agli scienziati russi è la consapevolezza del fatto che di qualunque ricerca scientifica, non importa quanto esotica, e di qualunque tecnologia, non importa quanto avanzata, si parli, i Russi ci erano arrivati con almeno venti anni di anticipo. Lo Space Shuttle? I sovietici avevano testato un mezzo simile alla fine degli anni Sessanta. I motori scramjet che l’America sta sviluppando ora? I Russi avevano un prototipo nel 1957. Lo studio della psicologia umana in ambienti confinati? I primi studi sono stati condotti in Unione Sovietica a partire dagli anni Trenta. Peraltro, queste rivendicazioni sono tutte vere: il problema è che l’Unione Sovietica, la cui comunità scientifica lavorava avvolta in una coltre di segretezza, non pubblicava i risultati delle sue ricerche, costringendo il resto del mondo ad andare avanti per conto proprio. Una battuta ricorrente nella comunità scientifica dice più o meno così: “Non puoi neanche dire che devi andare al bagno senza che Dimitri se ne venga fuori dicendo che i russi hanno inventato il water venti anni prima che gli Americani inventassero il sedere!”.
Fu così che mi recai da Tolyarenko a chiedere consigli riguardo al mondo dei rover planetari, ottenendo, fatte le debite proporzioni con la traduzione, una risposta di questo tipo: “Formelmente rover di esplorazione de planeta sono fatti oggi in America in Jet Propulsion Laboratory. Ofiamente in Russia noi faceva rover planetari quaranta anni fa: Lunakhod è sbarcato su Luna in 1970 e sai quanto ha lavuorato? Quasi un anno! Americani fuole fare rover che costa poco e lavuora per 10 anni. Questo è invisibile! Non suciederà mai! Hai sentito: rover americano Spirit è bluoccato in sabia di Marte, e sai perchè? Perchè ingegneri di America no ha pensato di fare ruote motrici indipendenti. Ma cosa fuoi: vita è vita!”.
Gli spiegai il mio desiderio di andare in Giappone, e lui mi rispose: “Formelmente, giapponesi è muolto avanzati in robotica. Chiedi de professor Yoshida, chi è uno di più grandi esperti di mondo. Puoi conoscere Yoshida a Genaio, quando fiene per fare competizione de robotica”.
La competizione robotica
Ai primi di gennaio, subito dopo le vacanze di Natale, ci trovammo coinvolti nella attività più divertente di tutto l’anno: la competizione robotica. La classe venne divisa in cinque gruppi, con la missione di realizzare un rover planetario capace di muoversi in modo autonomo in un recinto delimitato da nastro bianco, schivando degli ostacoli e raccogliendo campioni di pietre preziose presenti nel campo di gioco. Il punteggio veniva assegnato in base al numero di perle raccolte, alla capacità di schivare gli ostacoli e all’abilità di funzionare ininterrottamente senza incastrarsi.

La robotica è una branca dell’ingegneria che si fonda su tre discipline: la meccanica, l’elettronica e l’informatica. La meccanica è una disciplina fondata sulla cinematica, la branca della fisica che descrive le proprietà di sistemi di corpi in moto relativo, come leve, perni e ruote. Sviluppare la meccanica di un robot richiede conoscenze di fisica, di scienza dei materiali, abilità manuali e familiarità con strumenti come il tornio, il martello, il trapano e la morsa. L’elettronica a sua volta richiede conoscenze di fisica, di circuiti integrati e l’uso di strumenti come il saldatore. L’informatica robotica, infine comprende una componente di tempo reale che risulta poco familiare ai programmatori di alto livello, abituati a delegare al sistema operativo le operazioni tempo-dipendenti. Degli aspetti legati alla componente informatica per la programmazione dei robot torneremo a parlare più diffusamente nei prossimi articoli.
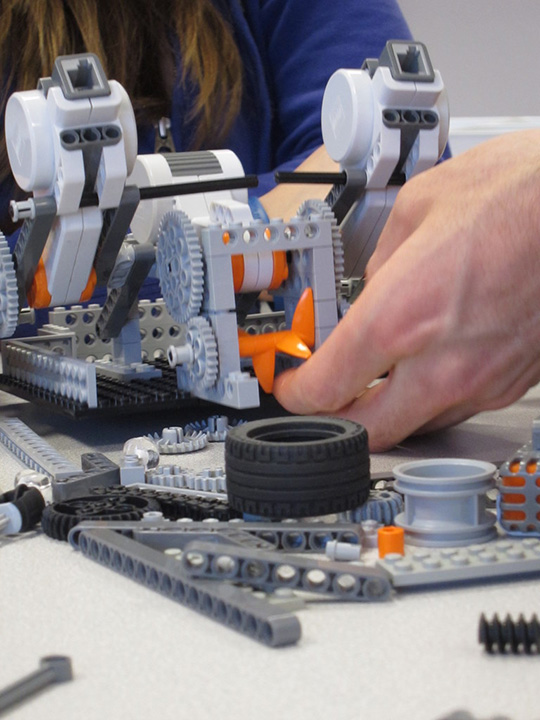
Una comoda soluzione
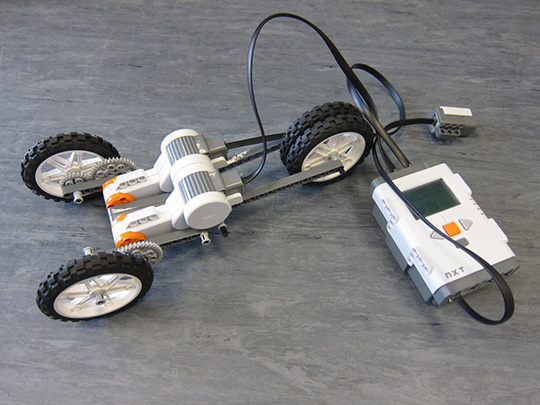
Per superare tutti questi scogli, che potrebbero scoraggiare chiunque decida di interessarsi alla robotica, da alcuni anni LEGO offre un kit che permette di aprire il mondo della robotica a un pubblico che in precedenza ne era escluso. Il kit Lego Mindstorm permette infatti di costruire e programmare robot perfettamente funzionanti in poche ore. La meccanica viene ridotta a un gioco di incastri, che permette di scoprire la cinematica in maniera intuitiva, combinando per tentativi le leve e le ruote dentate e gli altri componenti del Lego Technics. L’elettronica viene semplifcata grazie a un sistema modulare di attuatori e sensori che possono essere combinati tra di loro attraverso l’unità di controllo computerizzata. La programmazione informatica viene facilitata dalla presenza di un’unità di controllo, il cui sistema operativo mette a disposizione direttive di alto livello, accessibili attraverso linguaggi come il C, Java, Fortran e Mathlab. L’aspetto straordinario di questo kit è che permette, in poche ore, di costruire e mettere alla prova un robot perfettamente funzionante e accumulare esperienza in maniera estremamente rapida. Per questa ragione, il kit Lego Mindstorm viene utilizzato come strumento didattico nelle università di tutto il mondo.

Ritorno al passato!
Inutile dire che la competizione di robotica produsse una collettiva regressione all’infanzia. Se state leggendo questo articolo e siete nati grosso modo negli anni Settanta, anno più anno meno, è estremamente probabile che abbiate trascorso la vostra infanzia giocando con il Lego. Il fatto di avere una missione da compiere e il permesso, anzi, l’ordine di giocare, rese i tre giorni della competizione il momento piu memorabile di tutto l’anno.
I robot creati per la competizione si muovevano su ruote. La scelta era tra cingoli, ruote da trattore e copertoni da camion. Ogni metodo presentava vantaggi e svantaggi sulle piastrelle ruvide della sala di test. L’unico modo di scoprire quale potesse essere la scelta migliore era costruire un semplice prototipo e metterlo alla prova.
Ogni attuatore contiene due componenti: un motore passo-passo e un sistema di sensori odometrici capaci di misurare la velocità e la distanza percorsa. Il motore può essere mosso con precisione in entrambe le direzioni a diverse velocità. L’odometria permette di verificare se e come il movimento sia stato effettivamente eseguito. L’odometria è una caratteristica fondamentale della meccanica di un robot, dato che permette di controllare l’effetiva reazione agli stimoli di movimento. Se ordinate alle ruote di un robot di completare un giro in avanti, il sistema operativo deve aver modo di verificare l’effettiva risposta del motore allo stimolo nell’arco di un certo tempo. Immaginate due mezzi di peso differente comandati dallo stesso motore: un mezzo da 1 tonnellata presenterà un maggior resistenza rispetto a uno da 700 kg. Per questa ragione, nel primo caso il sistema di controllo richiederà che la potenza venga applicata per un tempo maggiore rispetto al secondo. L’odometria permette anche di implementare delle funzionalità avanzate, come le strategie anti-slittamento su terreni sabbiosi.

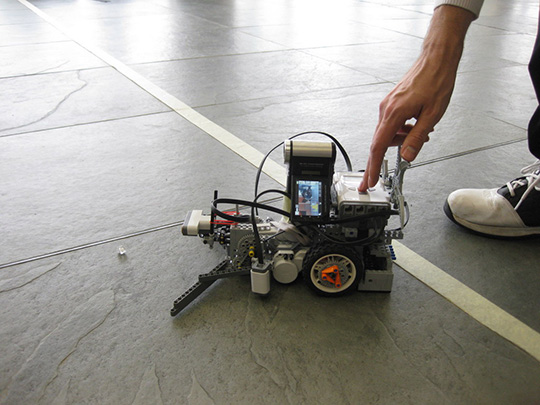
Andando avanti per tentativi ed errori, individuammo la modalità di locomozione che ci sembrava piu congeniale, utilizzando una doppia coppia di ruote larghe. Per evitare la complicazione di sviluppare un meccansimo di sterzo, decidemmo di poggiare la macchina su una coppia di cuscinetti. L’uso di due ruote motrici indipendenti permetteva di stabilire la direzione: muovere gli attuatori alla stessa velocità nella stessa direzione fa si che il rover vada dritto; velocità differenti fanno sì che il rover sterzi o ruoti su se’ stesso.

Per la raccolta delle gemme, decidemmo di sviluppare un meccanismo attivo basato su una sorta di aratro, mosso dal terzo attuatore. L’uso di una combinazione di ruote dentate permise di aumentare la coppia e ridurre la velocità del meccanismo di “mietitura”, in maniera da ridurre le possibilità che il meccanismo si bloccasse. Vari test permisero di identificaer la velocità operativa ideale.
Travolti dalla passione, io e il mio amico Guanlu perdemmo il senso del tempo: alle 2 di notte della prima sera, avevamo completato almeno 20 iterazioni. Il prodotto era ancora lontano dalla perfezione, ma l’apprendimento andava avanti a gran velocità.

Per mantere il rover entro il recinto, utilizzammo un sensore di luminosità puntato verso il basso. Il pavimento era grigio scuro, delimitato da un recinto di nastro bianco. Il sensore di luminosità permetteva di controllare se il rover stava passando sopra la striscia bianca, e di avviare la manovra correttiva.

Gli ostacoli venivano intercettati con un sonar, un sensore che invia un segnale audio e ne misura la riflessione da parte di un corpo in modo da identificare ostacoli fino a un metro di distanza. Sensori di contatto erano montati su respingenti, in modo da superareanche ostacoli che non venivano identificati dal radar.
Il software di controllo era basato su un ciclo infinito in cui, a intervalli regolari, venivano testate le variabili di stato, in modo da decidere quale azione intraprendere. Se i sensori danno il via libera, il rover continua a marciare nella medesima direzione. Se viene individuato un ostacolo, viene avviata la manovra di evitamento in modo da riportare il rover in condizione di operare.
Il regolamento prevedeva dei punteggi per ogni gemma raccolta e per ogni ostacolo evitato. Il modo migliore per aumentare la probabilità di queste due occorrenze era massimizzare la velocità. A velocità elevate, l’identificazione di ostacoli con il radar diventava però un aspetto critico. La precisione del sensore degenera all’aumentare della distanza: per questa ragione è importante calibrare la risposta del rover a circa 30 cm dall’ostacolo, in modo che ci sia lo spazio per effettuare la frenata e la manovra di evitamento. La manovra di evitamento prevedeva una retromarcia con svolta a sinistra di 40 gradi. In un primo tempo, avevamo provato a utilizzare un meccanismo di generazione casuale della direzione e dell’angolo di rotazione; in breve constatammo che questo approccio aveva la conseguenza di far convergere la direzione ultima del rover in linea retta, mentre quello che volevamo era che il rover esplorasse il terreno all’interno del recinto.

La competizione robotica fu uno dei momenti piu divertenti di tutto l’anno. A differenza di tutte le altre attività, non era previsto un voto: l’unico obiettivo era imparare il piu possibile divertendosi. La materia, molto divertente, e l’assenza di pressione fecero passare in secondo piano l’esito della competizione.


Yoshida
Il professor Yoshida è un esperto di fama mondiale nel campo della robotica spaziale. Il suo contributo più famoso alla esplorazione spaziale è il meccanismo di raccolta campioni della sonda Hayabusa. Hayabusa (“falco pellegrino”) è una sonda robotica giapponese, lanciata nel 2003 nel verso l’asteroide Itokawa. Giunta in prossimità dell’asteroide nel novembre 2005, Hayabusa ha eseguito una manovra mai tentata in precedenza: come un falco, la sonda è planata sull’asteroide, e ne ha catturato un frammento usando il meccanismo progettato da Yoshida.

Durante il viaggio di ritorno verso la terra, la sonda subì un’avaria, che causò l’interruzione delle comunicazioni. Dopo diversi mesi di silenzio, gli ingegneri riuscirono a ristabilire il contatto. Il viaggio di ritorno culminò il 13 giugno 2010, quando Hayabusa, tornata in prossimità della Terra, sganciò una capsula di rientro contenente i campioni dell’asteroide, che venne ritrovata in Australia. Hayabusa è stata la prima astronave a riportare un campione di materiale da così lontano. La conferma del contenuto, avvenuta di recente, ha segnato un enorme successo per l’agenzia spaziale giapponese.
Nonostante la sua fama, Yoshida è una persona molto umile e disponibile. Per tutta la durata della competizione si mise a nostra disposizione per consigli e chiarimenti. Nel corso dei quattro giorni, ebbi modo di parlare con lui in più occasioni. Mi parlò dei filoni di ricerca del suo laboratorio, come la locomozione su terreni sabbiosi e gli algoritmi di navigazione. Io gli parlai della mia esperienza nella progettazione di sistemi informativi e nello sviluppo di programmi a interfaccia grafica. Alla fine emerse spontaneamente una proposta: “I miei studenti sono bravi ingegneri meccanici, ma gli strumenti che produciamo sono sempre trascurati dal punto di vista dell’interfaccia grafica. Stiamo sviluppando un rover per il Google Lunar X-Prize, e ci servirebbe un programma grafico per la navigazione e il controllo remoto. Ti potrebbe interessare?”.
Potete immaginare la mia risposta. Mi ero appena guadagnato un biglietto per il Giappone.
Il supporto familiare
A febbraio tornai in Italia a trovare le mie figlie. La sera, prima di andare a dormire, raccontai loro la mia esperienza, e mostrai le foto e i filmati della competizione. Laura, che a 9 anni aveva già una grossa familiarità con le tecnologie di casa, mi disse entusiasta: “Papà, è bellissimo: devi promettermi che quando torni dal Giappone mi insegni tutto quello che hai imparato, perchè anche io voglio diventare una esperta di robotica!” Valeria, 6 anni e una passione per la danza e le arti figurative, mi guardò perplessa e mi chiese: “Ma papà, perchè vi costringono a fare certe cose?”
Spiegai loro che sarei andato in Giappone a lavorare su un rover spaziale, che è un robottino che viene mandato con un razzo sulla Luna per esplorare il terreno e raccogliere campioni. “È un robottino come Wall-E?” mi chiese Laura; “Si, esattamente,” le risposi, e le mostrai alcne immagini di Spirit e Opportunity, i due rover Marziani della NASA. “E com’è fatto un razzo?”, presi il computer e le mostrai un paio di immagini di razzi al momento del lancio. “Com’è la Luna?” Le mostrai alcune foto dello sbarco sulla Luna, con gli astronauti che balzano sul suolo del nostro satellite.
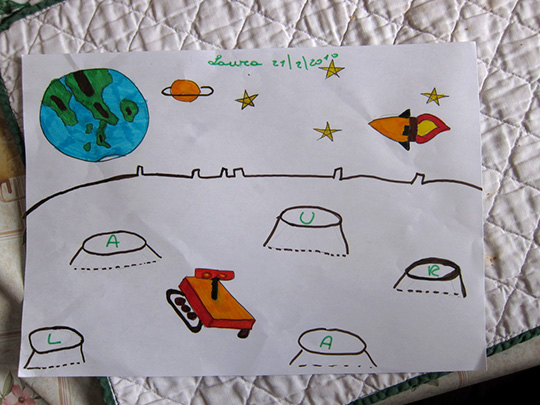
Laura prese un foglio di carta e i pastelli, e si mise a disegnare quello che le avevo appena raccontato, con un risultato sbalorditivo. Il disegno era talmente dettagliato che quando lo mostrai ai miei insegnanti, si misero a discuterne come se fosse un disegno tecnico.”Tua figlia è molto più sfeglia di te!”, disse Tolyarenko, “Guarda razzo: Single Stage to Orbit, la cosa miliuore per partire da Luna! In Russia usaviamo questi razzi 30 anni fa! Americani ci stanno provuando, ma senza tecnologia giusta è invisibile, non suciederà mai! Sarà un altro disastro, ma cosa vuoi: vita è vita!”.
Yoshida a sua volta se ne sarebbe venuto fuori con osservazioni di carattere tecnico-progettuale: “Tua figlia ha usato dei cingoli, perchè fanno una presa migliore sulla regolite del suolo Lunare. Vedo anche che ha messo i sensori di prossimità in posizione elevata, per avere un maggior controllo dell’ambiente sottostante”. David, un amico che lavora in NASA, mi disse invece: “Forte tua figlia: a 9 anni ha già scritto il suo nome sulla Luna!”
E fu così che a fine gennaio 2010 mi ritrovai con un invito ufficiale per il Giappone, dove ad attendermi ci sarebbe stato un incarico fuori dal comune. Questa consapevolezza mi avrebbe permesso, a maggio, di superare la malinconia della fine delle attività didattiche e di guardare con trepidazione al futuro.
Conclusioni: una nota di solidarietà
Il prossimo mese parleremo delle prime impressioni al mio arrivo in Giappone, e cominceremo a vedere come si sono svolte le attività di programmazione dei robot all’Univeristà di Tohoku, a Sendai. Ma è inevitabile, a questo punto, dedicare una breve riflessione agli eventi drammatici che hanno colpito il Giappone, e in particolare proprio la regione in cui ho operato.
Nelle scorse settimane, la città di Sendai è improvvisamente entrata nelle cronache a causa del violento terremoto che ha colpito il Giappone. Sendai, molto prossima geograficamente all’epicentro, è stata colpita sia dal sisma che dal conseguente tsunami.

Ho saputo con sollievo che i miei amici giapponesi sono in salvo, che lo tsunami ha colpito solo le zone costiere e che la robusta architettura giapponese ha retto le violente scosse, limitando i danni su persone. Grazie a Facebook ho potuto vedere le foto del laboratorio, e degli altri luoghi che ho frequentato nel corso dell’estate, e i danni prodotti dal sisma. Schiacciati dal peso dei mobili, i robot e le attrezzature sperimentali del laboratorio sono collassate, e richiederanno settimane di riparazioni.

Ma come ho avuto modo di scoprire di personalmente, i Giapponesi non amano piangersi addosso, e anche se sono costretti a girare con l’elmetto per ripararsi dalle macerie e stanno vivendo senza acqua, luce e gas, si prestano sempre all’obbiettivo della macchina fotografica con un sorriso. Le testimonianze che ho ricevuto mostrano un popolo che si rimbocca le maniche e che lavora assieme alla protezione civile per il ripristino della normalità, anche in condizioni drammatiche come queste, le cui gravi conseguenze ci auguriamo possano essere superate nel migliore dei modi.
Andrea Gini è un professionista del settore aerospaziale, un consulente IT e un giornalista scientifico. La collaborazione con MokaByte, iniziata nel lontano 1999, è stata l‘unica costante in un percorso professionale che lo ha portato dalla fotografia professionale alla scienza spaziale. Attualmente lavora al Payload Safety Review Panel presso il centro di sviluppo tecnologico ESTEC dell‘Agenzia Spaziale Europea (ESA) a Noordwijk, nei Paesi Bassi. Andrea è anche fondatore ed editore responsabile dello Space Safety Magazine, un giornale specializzato pubblicato congiuntamente dall‘International Association for Advancement in Space Safety (IAASS) e dalla International Space Safety Foundation (ISSF). Nella IAASS, Andrea ricopre il ruolo di Chairman dell‘Information and Communication Committee, ed è responsabile dello sviluppo della strategia di comunicazione dell‘associazione. Nel tempo libero, ama stare con le figlie, cucinare, viaggiare, suonare con la chitarra, studiare le lingue e la storia contemporanea, abbracciare il suo cane e ascoltare la musica degli Who, dei Led Zeppelin, di Rihanna, 50 Cents, Eminem, Lady Gaga e Britney Spears.